中风是全世界长期残疾的主要原因。全球每年有超过 1500 万人中风,四分之三的中风幸存者的手臂和手部会出现损伤、虚弱和瘫痪。
许多中风幸存者依靠较强的手臂来完成日常任务,从提杂货到梳理头发,即使较弱的手臂有改善的潜力。打破这种被称为“手臂不使用”或“习得性不使用”的习惯可以提高力量并防止受伤。
但是,确定患者在诊所外使用其较弱手臂的程度具有挑战性。在观察者悖论的典型案例中,测量必须是隐蔽的,以便患者自发地表现。
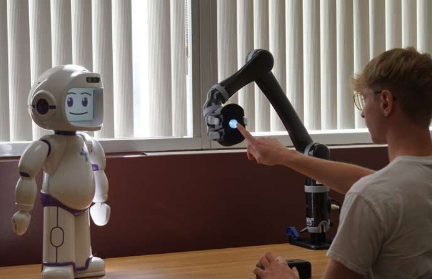
现在,南加州大学的研究人员开发了一种新型机器人系统,用于收集中风康复者如何自发使用手臂的精确数据。《Science Robotics》发表的论文概述了这种首创方法。
该方法使用机械臂跟踪 3D空间信息,并使用机器学习技术处理数据,生成“手臂不使用”指标,可以帮助临床医生准确评估患者的康复进度。社交辅助机器人 (SAR) 在整个挑战过程中提供指导和鼓励。
“最终,我们正在尝试评估某人在物理治疗中的表现在多大程度上转移到了现实生活中,”该论文的主要作者、计算机科学博士生内森·丹勒 (Nathan Dennler) 说。
这项研究由南加州大学托马斯·洛德计算机科学系和生物运动学和物理治疗系的研究人员共同努力。
免责声明:本文由用户上传,如有侵权请联系删除!